3D Surface Inspection
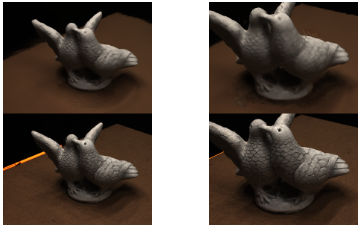
Formulated a novel 3D inspection framework integrating a modified HF-NeuS model for surface rendering and semantic understanding, along with DeepCrack for neural crack segmentation through 3D reconstruction.
Projects
From path planning to computer vision, these projects showcase my journey in robotics and AI.
Formulated a novel 3D inspection framework integrating a modified HF-NeuS model for surface rendering and semantic understanding, along with DeepCrack for neural crack segmentation through 3D reconstruction.

Developed a deep learning model to predict depth maps from underwater images and utilize neural predictions to eliminate light attenuation and haze, significantly improving visual clarity in underwater imagery.
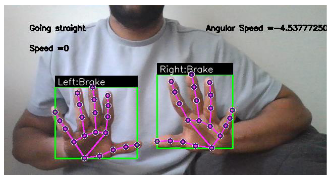
Constructed a virtual car driving interface using Google MediaPipe for real-time hand gesture recognition and machine learning classification, simulated on TurtleBot and Gazebo for behavior validation.
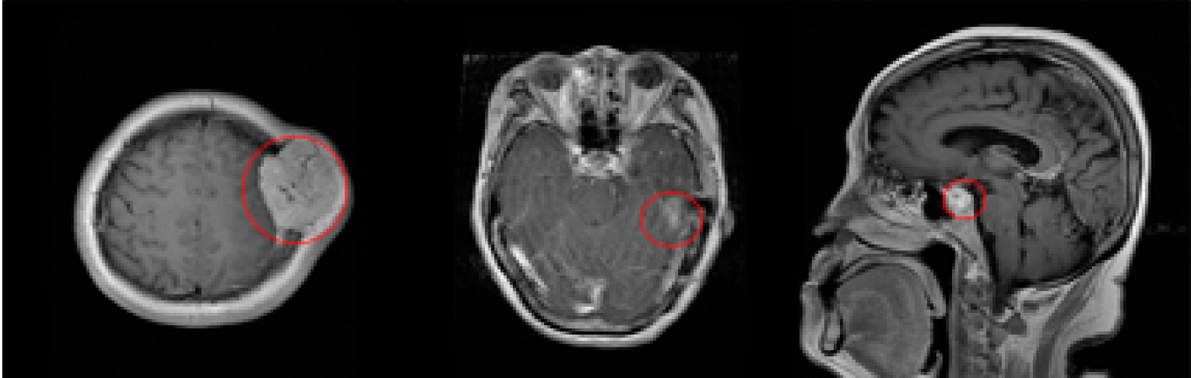
Developed a generative AI model to synthesize brain cancer MRI images for dataset augmentation, enhancing training diversity and improving tumor detection model accuracy.
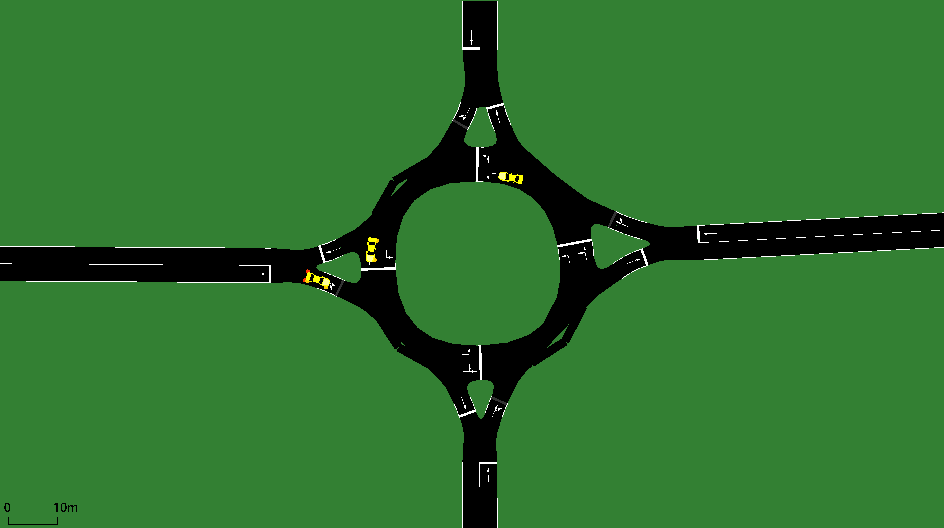
Leveraged reinforcement learning techniques, specifically Deep Q-Learning, to optimize autonomous vehicle behavior at intersections, improving traffic flow and safety in mixed autonomy environments.
Implemented a leader-follower system using ArUco markers for leader identification, LiDAR for obstacle detection, and A* path planning for dynamic and efficient navigation control in multi-robot systems.